

上海交通大学智能网联电动汽车创新中心团队在秦通、杨明老师指导下,于机器人领域顶级旗舰会议IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)上发表题为“Building Hybrid Omnidirectional Visual-Lidar Map for Visual-Only Localization”的研究论文。文章主要探讨了利用视觉和激光传感器构建具有纹理和几何信息的先验混合地图,为纯视觉机器人在困难环境下的定位导航提供了系统性解决方案。本文第一作者是溥渊未来技术学院访问学生黄竟洋。
研究背景 Research Background
近年来,基于视觉的定位技术在机器人和自动驾驶等领域发挥着重要作用。然而,传统方法(如SLAM和SfM)存在深度估计不准确、计算成本高、环境适应性差等问题,尤其在纹理稀疏或动态场景中,单目或双目视觉的定位精度和鲁棒性受限。虽然激光雷达(LiDAR)能提供精确的3D结构信息,但纯LiDAR定位依赖高精度传感器,成本较高,且难以与视觉数据直接融合。现有的跨模态定位方法主要依赖几何对齐(如ICP)或深度学习,前者对点云质量敏感,后者计算开销大,难以在资源受限的平台上(如无人机)实时运行。因此,如何在低成本传感器组合(如相机+IMU)下实现高效、高精度的跨模态定位,仍是一个关键挑战。
研究成果 Research Results
为了综合解决上述问题,本文提出一种混合视觉—LiDAR关键帧建图与纯视觉重定位框架,适用于计算资源受限的无人机。在建图阶段,系统融合四目相机图像与LiDAR数据,构建全向关键帧地图,精确关联图像特征与LiDAR点云深度,解决了传统视觉建图的尺度模糊和深度误差问题。在重定位阶段,系统先基于视觉特征检索相似关键帧,建立2D—2D匹配,再通过关键帧关联的3D点云实现2D—3D对应,最终结合PnP-RANSAC和位姿图优化计算精确位姿。
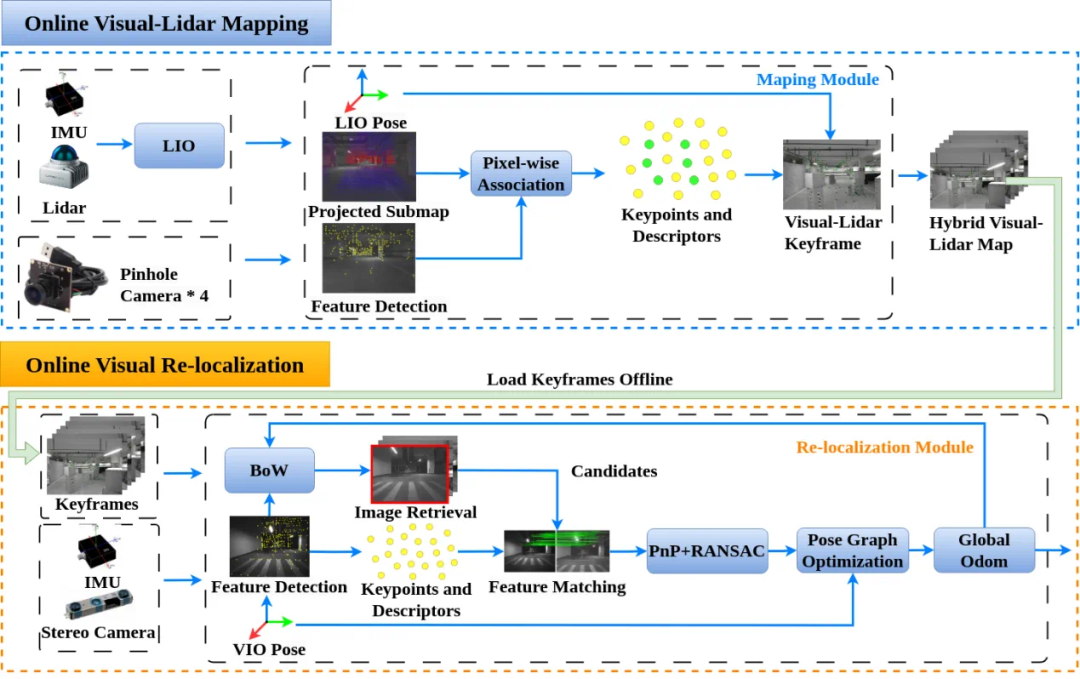
在线建图/定位算法框架图
该框架的创新点如下:
1)全向关键帧设计:利用多相机系统生成360°关键帧,支持任意视角的快速重定位,提升环境适应性。
2)轻量化跨模态融合:以关键帧为桥梁,高效关联视觉与LiDAR数据,避免传统ICP的高计算成本。
3)实时性优化:算法可在嵌入式设备上实时运行,适用于无人机自主导航。实验结果表明,该系统在复杂环境中的定位精度接近LiDAR,且计算效率满足实时性需求。
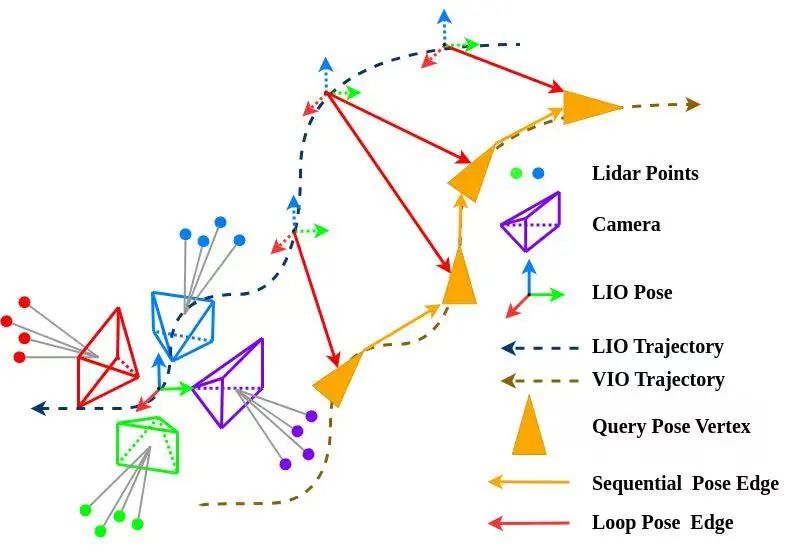
多方向节点位姿图优化示意图
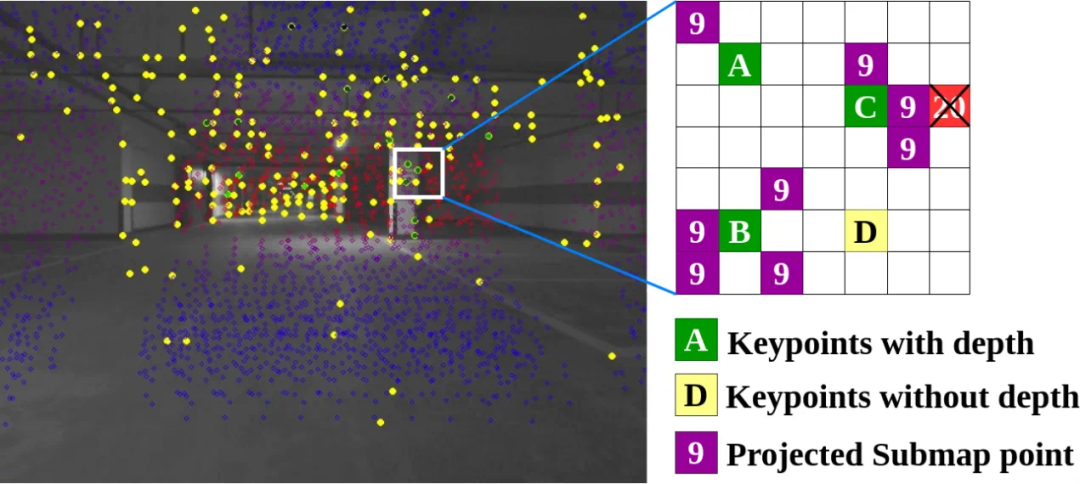
点云—像素关联方法
演示视频
作者信息
Author Information

黄竟洋
上海交通大学溥渊未来技术学院访问学生。研究方向:跨模态机器人定位系统。

秦通
上海交通大学溥渊未来技术学院副教授。博士毕业于香港科技大学电子及计算机工程系,曾任职华为车BU。秦通被评选为华为公司首届“天才少年”。他在担任华为车BU感知SLAM技术专家期间,参与研发华为ADS智能驾驶系统,贡献了业界领先的智能驾驶方案,并在多款车型上实现了规模化商用。近年来以第一/通讯作者身份在TRO、JFR、RAL、ICRA等机器人领域顶级期刊和会议上发表高质量论文十余篇。曾获得IROS2018最佳学生论文奖和TRO最佳论文提名奖。研究方向:智能驾驶感知、构图、定位;端到端AI大模型;移动机器人 SLAM。

杨明
上海交通大学自动化与感知学院特聘教授,博士生导师,智能网联电动汽车创新中心主任,国家级高层次人才。现任中国自动化学会智能车工委会副主任和教工委副主任、中国人工智能学会理事和智能机器人专委会副主任、IEEE IROS-CPRB副主编、《IEEE Transactions on Intelligent Vehicles》和《IEEE Transactions on Intelligent Transportation Systems》期刊编委。长期从事无人车和智能机器人等方面教学与研究工作,近年来在国内外学术刊物上发表论文200余篇,获国家发明专利授权50余项,指导学生多次获得IEEE Intelligent Vehicle Symposium、中国智能机器人大会等国内外顶级会议优秀论文。作为负责人,先后获得上海市技术发明一等奖、上海市教学成果一等奖、教育部技术发明奖等奖项。研究方向:低速无人驾驶系统。
