

上海交通大学智能网联电动汽车创新中心团队在张颂安老师指导下,于计算机视觉领域顶会IEEE/CVF International Conference on Computer Vision(ICCV)上发表题为“Adapt Foundational Segmentation Models with Heterogeneous Searching Space”的研究论文。本文第一作者是溥渊未来技术学院2023级宁德时代联培硕士生易立。
研究背景 Research Background
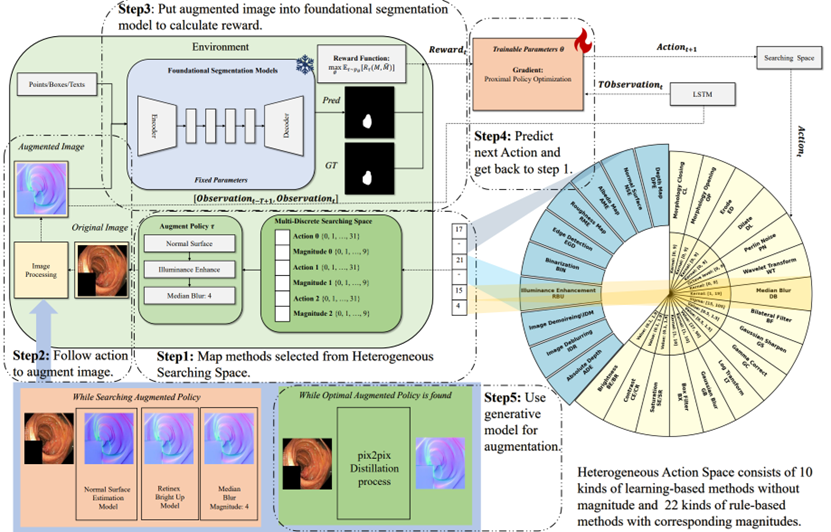
通用基础分割模型(Foundational Segmentation Model)在非常规图像域(如伪装物体,医疗检测)上表现欠佳。同时由于数据集准备困难和时间限制,微调(Fine-tune)通常难以实施。为在保持不调整通用基础分割模型的同时提升分割性能,一种可行的方法是对分割模型进行图像预增强。
研究现状 Research Status
现有的图像增强主要依赖基于规则(Rule-based)的方法,限制了增强效果。尽管基于学习(Learning-based)的方法能丰富增强方法的多样性,但基于规则的增强具有程度可描述性(如轻度/强烈亮度调整),而基于学习的方法通常预测不可描述程度的目标(如深度估计),二者结合会形成异构搜索空间(Heterogeneous Searching Space)。
研究成果 Research Results
针对上述情况,本文提出“自适应增强”(Augment To Adapt)范式,用最优异构增强策略替代传统规则增强以优化分割效果。该方法采用32种增强技术(22种基于规则、10种基于学习)缓解参数无法对齐的问题,构建髙鲁邦性的多项离散异构搜索空间。为在实际场景中应用最优策略,本文通过蒸馏技术加速预处理过程。该方法通过领域特异性增强策略显著提升了模型适应性,其在分割表现上的提高已经在NJU2k,VT1k,CAMO,NC4k,COD10k,Kvasir-SEG,BUSI,KoletorSDDV2和MTSD这9个公开数据集上得到验证。
作者信息

易立
上海交通大学溥渊未来技术学院电子信息方向研究生。研究方向:计算机视觉、强化学习、分割域适应。

张颂安
上海交通大学溥渊未来技术学院长聘教轨助理教授,智能网联电动汽车创新中心成员,主要从事自动驾驶汽车决策系统算法设计方面的研究,在TITS, TIV, CVPR,ICCV 等期刊与会议上发表30余篇论文。张颂安老师于2013年和2016年在清华大学车辆工程系分别获得本科和硕士学位,2021年于美国密歇根大学机械工程系获得博士学位,导师为Mcity Director彭晖教授。毕业后,其加入美国福特汽车公司机器人研究所担任研究员,并兼任福特—大学联合项目机器人方向提案评审组Committee Chair。2023年,张颂安老师加入上海交通大学溥渊未来技术学院。研究方向:智能车和机器人决策控制算法、强化学习、元强化学习、工业具身智能、AI辅助航空发动机设计。


